1.2 sMonitor s5p6818开发平台
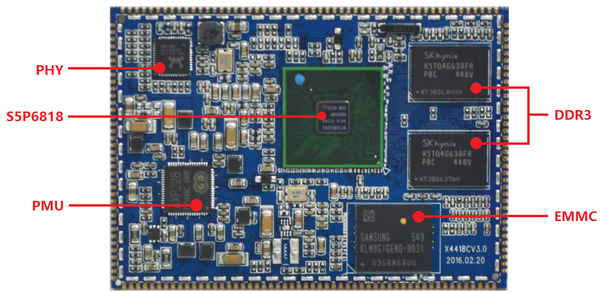
目录s5p6818介绍开发板介绍S5P6818采用28nm制作工艺,内置高性能8核A53 ARM架构,在多媒体性能上,它几乎支持全格式视频解码,在 LCD 控制器上,芯片板载 LVDS、 RGB、 MIPI 三路显示控制接口, 显示分辨率可以高达2048*1280@60Hz。 同时,内部集成千兆以太网控制器,能很好地满足更高的网络要求。
核心板介绍6818核心板具有以下特性:
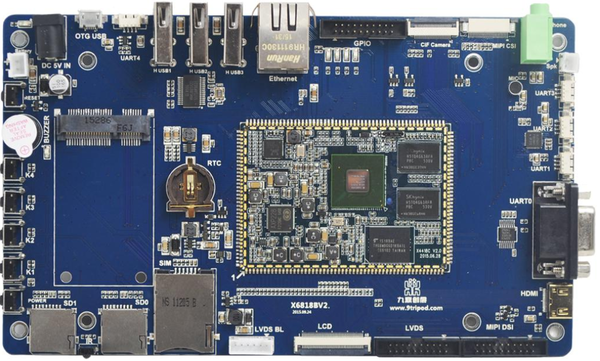
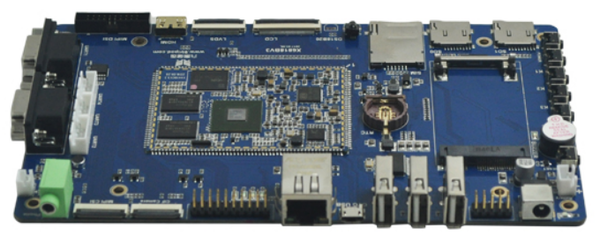
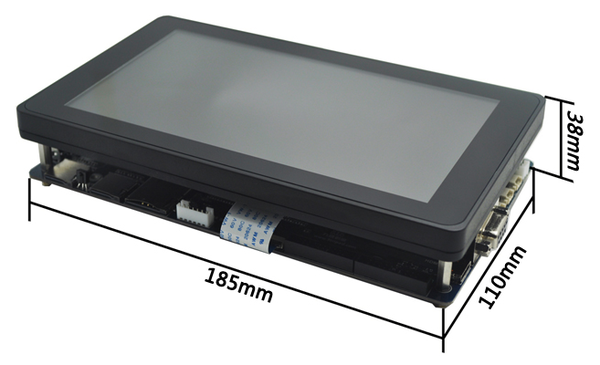
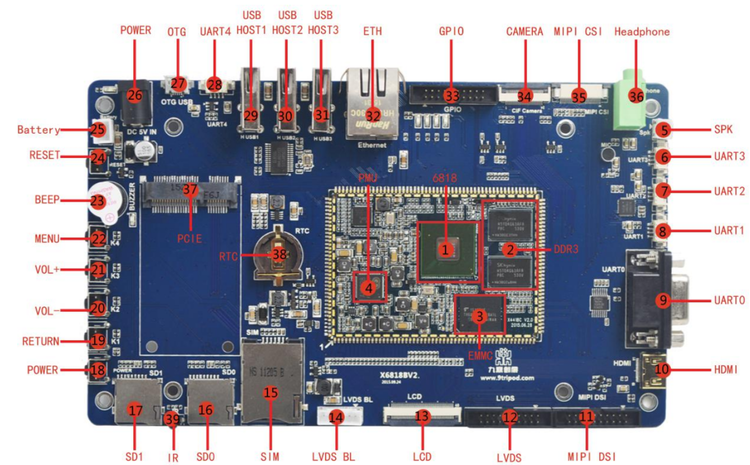
底板介绍s5p6818简单使用硬件设备清单1 6818开发板一套(带7寸1024*600电容触摸液晶模组)
2 5V/2A 电源适配器 1 个
3 USB 数据线 1 根
4 普通网线一根
5 串口线 1 根
简单使用1.硬件设备连接 1 使用电源线将开发板与电脑连接起来
2 使用串口线将开发板与电脑连接起来
3 使用网线将开发板与电脑连接起来
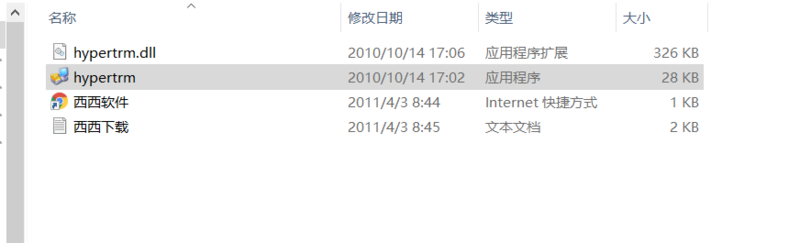
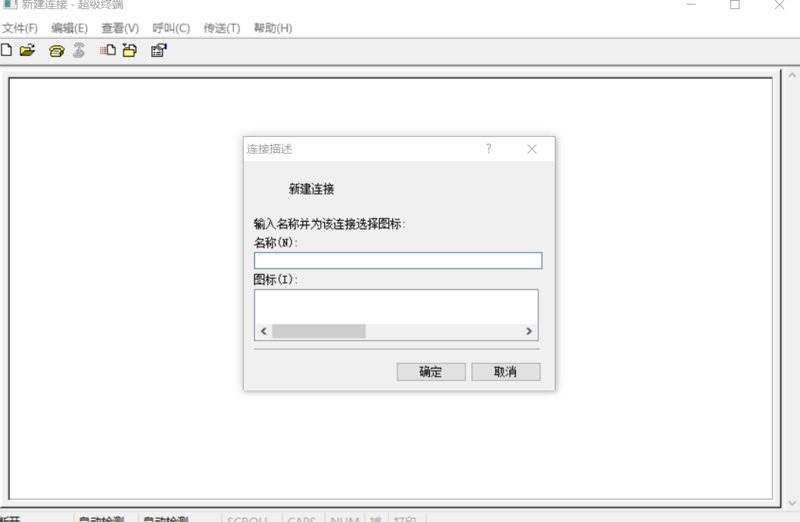
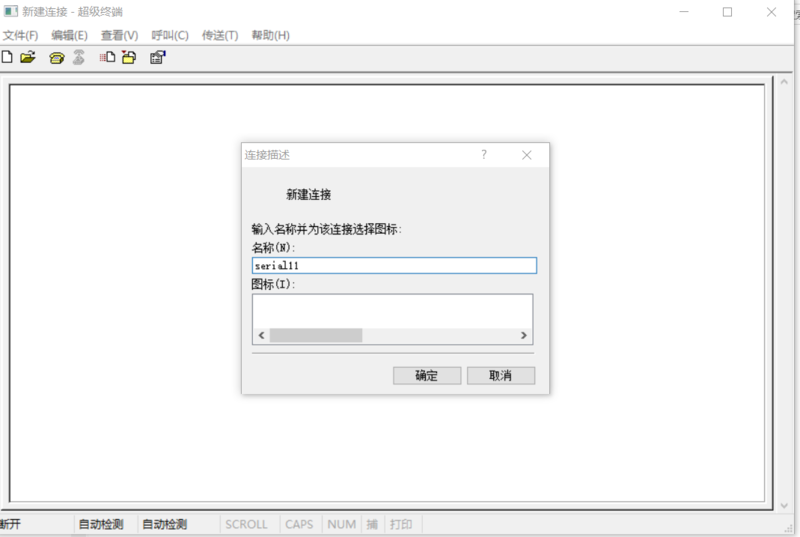
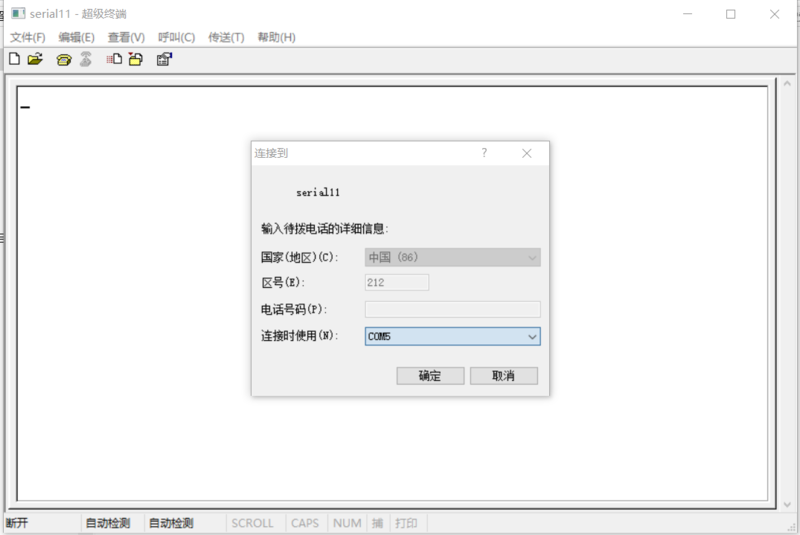
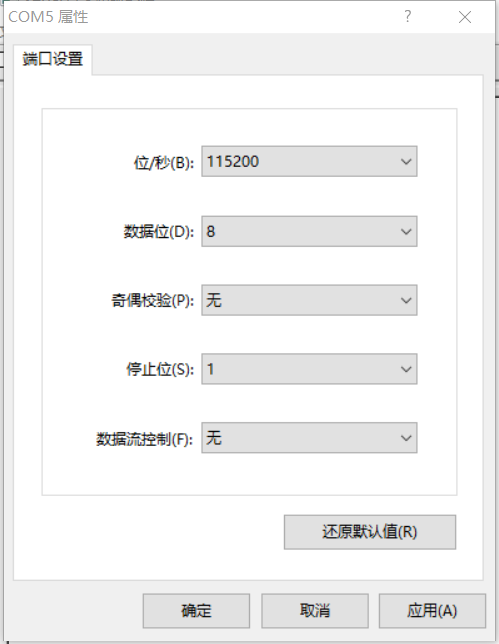
4 打开串口工具
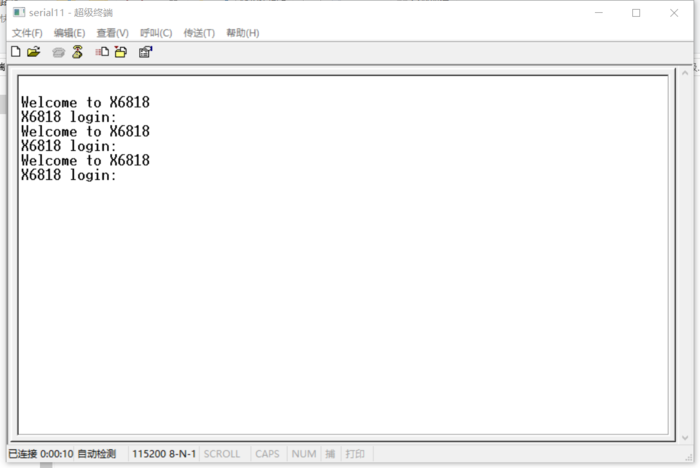
如果不能自动识别出串口,则手动查看端口如下:
输入用户名root,密码123456,回车可以正常进入开发板linux系统中。
开发板环境优化经过上面步骤,我们可能正常进入开发板的后台控制终端,接下来进行开发板的个性化环境配置
关闭自启动
vi /etc/init.d/S99qttest
start)
echo "Starting qttest..."
#/usr/share/demo/qttest &
#/usr/local/bin/smartpic2 -qws &
;;
保存退出.
配置无线网络
vi /etc/init.d/S70netconfig
#ifconfig eth0 down
#insmod /lib/modules/wifidrv/rt3070sta.ko
#wpa_supplicant -B -ira0 -c /etc/wpa_supplicant.conf -Dwext
#ifconfig ra0 192.168.3.11 netmask 255.255.255.0
#route add default gw 192.168.3.1
将上面的语句前面的#去掉
192.168.3.x表示开发板的ip地址,2<x<254 注意根据无线路由器实际情况修改“网关” 如果想要ping外网,还要配置好域名服务器IP
vi /etc/wpa_supplicant.conf
ssid="407" psk="12345678"
reboot 交叉开发调试下面介绍如何在ubuntu下面编辑、编译并下载调试应用代码。
编辑编译程序
# mkdir /opt/armtest # cd /opt/armtest
# vi test.c
#include <stdio.h>
#include <unistd.h>
int main(void)
{
int cnt = 20;
while(cnt--)
{
printf("hello,aic-iot!\n");
sleep(1);
}
return 0;
}
# arm-linux-gcc test.c -o test_arm
U盘下载调试
# mkdir /usb # cat /proc/partitions 会发现多了一个sda1的目录,此为U盘节点 # mount /dev/sda1 /usb # cp /usb/test_arm /tmp # cd /tmp #./test_arm -qws & 可看到程序正常启动并显示到LCD屏幕中,点击可进行相应操作。
# rm -rf /var/lib/dbus # mkdir /var/lib/dbus # dbus-uuidgen >/var/lib/dbus/machine-id 执行完以上几条命令,重新执行myled程序即可正常启动。 网络下载调试前面安装ubuntu时,系统默认已经安装了nfs后台服务,现在只需要配置并启动,即可使用nfs方式下载test_arm程序到开发板测试。
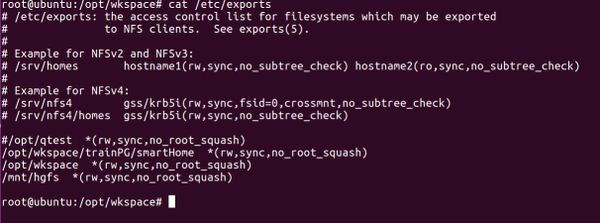
# cat /etc/exports 如果提示找不到此文件,则系统还没有安装nfs服务,需要安装可以参考前面详细的ubuntu文档 如果如下提示,则说明已经安装
打开/etc/exports文件,添加以下内容 /opt/wkspace/trainPG/smartHome *(rw,sync,no_root_squash)
/opt/wkspace *(rw,sync,no_root_squash)
/mnt/hgfs *(rw,sync,no_root_squash)
/nfs *(rw,sync,no_root_squash)
保存退出。
# /etc/init.d/nfs-kernel-server restart
# mkdir /nfs # mount -o nolock 192.168.0.xxx:/nfs /nfs # cd /nfs # ./test_arm 此时程序可以在开发板端正常执行起来。 注意:192.168.0.xxx即你的ubuntu系统IP 如果同样报dbus-uuid等关键字的错误,可参考上面u盘挂载部分的解决方案。
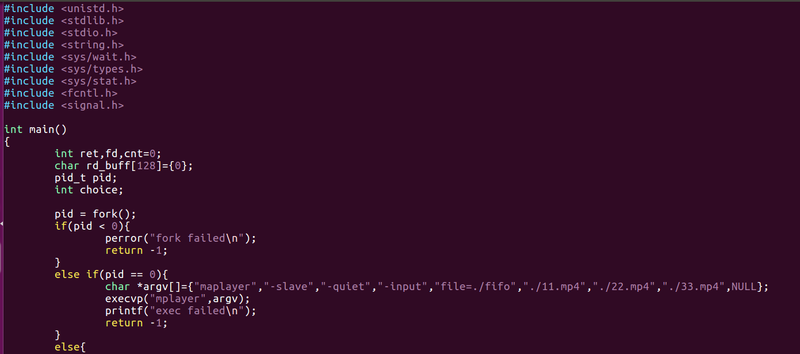
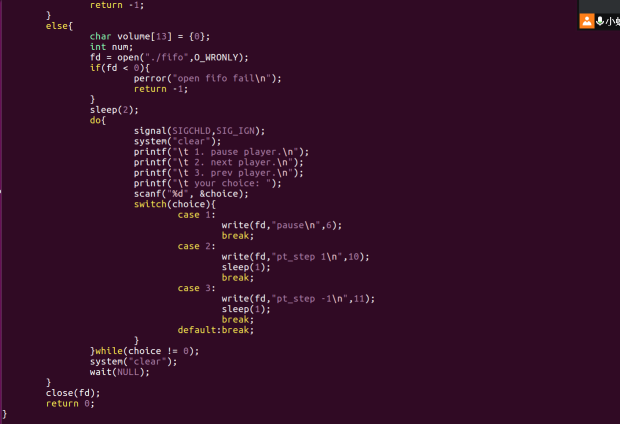
动手实践实操: 1.准备工作 mkdir /nfs/player cd /nfs/player mkfifo fifo 将下面视频文件下载并拷贝到ubuntu的/nfs/player目录下并解压出来
在/nfs/player目录下新建文件 vim test.c 添加以下代码: 保存退出。 3. 编译程序 arm-linux-gcc test.c -o test 或者执行 /usr/local/arm/ext-toolchain/bin/arm-linux-gcc test.c -o test_arm 会在当前目录下产生名为test_arm可执行文件,后面需要下载到开发板执行 4. 下载执行
返回: 上一页 |